wetch.hatenablog.com
wetch.hatenablog.com
やりたいこと
以前やったときと同じ.
- 時間反転と空間反転を区別するのではなく,時空反転として統一的に記述したい.
- 各変数ごとにマイナスが付くのかつかないのか思い出すのが大変なので,覚えやすい法則にしたい.
今回は「覚えやすい」の部分をより改善するため,絵にできないか試してみる.
Source field
電流,磁場
xy平面上にループ状の電流が微小時間
だけ流れたとする.その瞬間だけ磁場(z成分
だけ)が生じる.この様子を絵にするとこんな感じ.

縦方向の座標軸を時間にしていることと,磁場
この絵で

のようになる.
y軸について反転させても同様(符号が変わるのは

時間軸方向に反転させると,電流

となる.これもあたかも
電荷
ここでループ電流に電流が分断される箇所を入れる(コンデンサをイメージすればいい).これで同様に時刻に
だけ電流
を流すと,コンデンサの両極には
の電荷が生じ,電流がなくなっても電荷は残り続ける.これは時間軸方向に伸びる線で電荷が表されることを意味する.少し後の時刻
にコンデンサを短絡させて電荷を消すとしよう.

時刻

すると上向きの線がプラスの,下向きのがマイナスの電荷を表すことになる.2本の電流の線および2本の電荷の線が合わさって時空内で閉ループになっている.
この絵をx, y, t軸方向にそれぞれ反転させる.電荷の符号が変わるのは時間反転のとき

となる.この絵でもそれぞの反転は自然な鏡映しで考えればいいことが分かる.
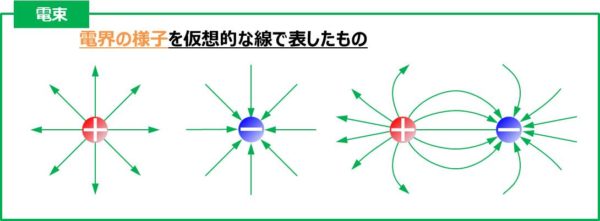
電束
電荷が存在するなら電束が生じるから,この絵にさらに電束を書き加えよう.この絵ではほぼだけなのでそれだけ考えよう.
はプラスからマイナスの向きだが,この向きを
のような回転矢印で表して書き込む.

そして反転.

となる.これでも成分の変換則と自然な鏡映しが整合している.いい感じだ.
Force field
磁場,ベクトルポテンシャル
絵を変えよう.x軸に沿った小さいコイルがあり,そこには過去からずっと電流が流れていて磁束が存在したとする.zx平面上の1本の磁束に注目すると,それはコイルを貫通する閉曲線になっている.その
の内側にはベクトルポテンシャル
も存在する.
がzx平面上にあることから
の成分はほぼ
のみなのでそれだけ考えよう.状況を絵にするとこんな感じ.


となる.
この系をまずx軸で反転すると,符号変化するのは

となる.
同様にy, t軸で反転すると,符号変化するのはy軸反転のときの

となる.やはりこの場合も自然に鏡映しにした状態と整合している.
電場
この系がある時刻でy方向に(一瞬で)移動し,また静止したとする.磁場が動いたので電場ができる.
の向きはこの絵だと外向き,広がるような向きだが,磁束と同じ向きの回転矢印で表す.

x, y, t軸反転で符号が変わるのはx軸反転とt軸反転

となる.

ちょっと待てよ...
ポテンシャルは4次元ベクトルでとか,4次元微分形式で
にはマイナスを付けてるんだよな.
ということは上の絵でもだけ逆向きにするとか,そういうことを考えないといけないのではないのか?
まだちょっと整理できてない.
まとめ
電磁場の時間反転・空間反転による成分の変換則は,数式で考察しなくても,自然に絵をかけば直感的に理解できそうだ.擬ベクトルかどうかも関係ない.*1
ただし絵を描くルールとして,
- 電荷
とスカラーポテンシャル
の正負は時間軸方向を向く真っすぐな矢印の向きに変換する
- 磁場
,磁束密度
の向きは空間軸方向だけを含む面内で回転する矢印で表す
- 電場
,電束密度
の向きは時間軸方向を含めた面内で回転する矢印で表す
というのを考えなきゃいけないが.
参考
ベクトル絡みで、軸性ベクトルは極性ベクトルと区別するために矢印使わずに軸が回っている感じの記号にしたらどうか、と思ったことがあるが、まだ使う機会を得てない。
— 前野[いろもの物理学者]昌弘 (@irobutsu) 2020年7月21日
(Eが極性、Bが軸性) pic.twitter.com/g2K1aIOzaA
*1:実は関係ないこともない.の向きはホッジスターをとった状態で今回の絵では表しており,本来の擬ベクトル等の状態とはちょっと違う.